| Version 18 (modified by , 15 years ago) (diff) |
|---|
TP3 : Processeurs programmables
1 Objectif
L'objectif de ce troisième TP est d'introduire des processeurs programmables dans les architectures modélisées, puisque, pour des raisons de flexibilité et de re-utilisation des plate-formes matérielles, les concepteurs de systèmes intégrés essaient de réaliser le plus grand nombre possible de fonctions en logiciel, sur des processeurs généralistes, ou sur des processeurs de traitement du signal.
On utilisera des processeurs RISC 32 bits, car ce type de processeur possède un très bon rapport (puissance de calcul) / (consommation énergétique).
On introduira également dans l'architecture les mémoires embarquées contenant le code binaire et les données de l'application logicielle.
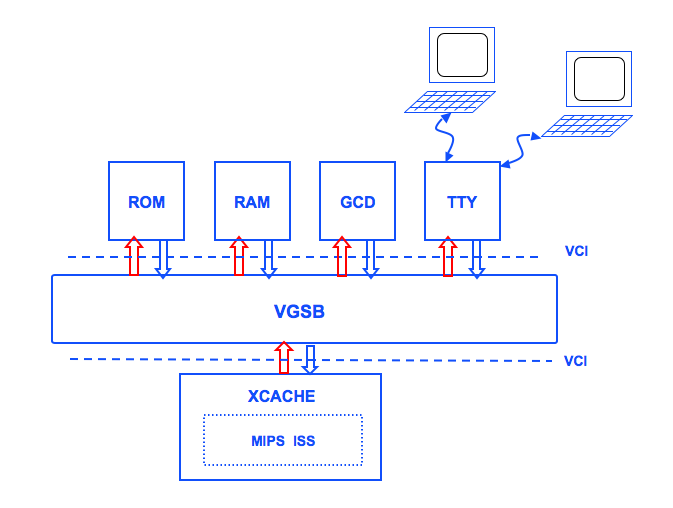
2 Architecture matérielle cible
L'architecture matérielle modélisée dans ce TP comporte un seul initiateur VCI et 4 cibles VCI :

- xcache est un processeur MIPS32 avec ses caches L1. On utilise le composant VciXcacheWrapper.
- rom est une mémoire non inscriptible contenant le code de boot. On utilise le composant VciSimpleRam.
- ram est une mémoire inscriptible contenant le code et les données. On utilise également un composant VciSimpleRam.
- tty est un périphérique adressable de type écran/clavier. On utilise le composant VciMultiTty.
- lcd est le coprocesseur cible réalisant le calcul du PGCD. On utilise évidemment le composant VciLcdCoprocessor.
- vgsb est le bus système déjà utilsé dans le TP2. On utilise le composant VciVgsb.
Les modèles de simulation des composants matériels instanciés dans cette architecture sont disponibles dans la bibliothèque SoCLib. Ils vous sont fournis, et vous n'aurez pas à les re-écrire vous-même. Vous pouvez obtenir une description fonctionnelle détaillée pour chacun de ces composants sur le site WEB de !oCLib : https://www.soclib.fr/trac/dev/wiki/Component
Le composant VciXcacheWrapper est un contrôleur de cache générique à interface VCI, qui peut être utilisé pour interfacer différents coeurs de processeur avec le reste du système. Le coeur du processeur est modélisé par un ISS (Instruction Set Simulateur). Le type du proceseur instancié (MIP32, ARM, SPARCV8, PPC405, NIOS, MicroBlaze, etc.) est défini par un paramètre template du composant VciXcacheWrapper.
Le composant VciSimpleRam est utilisé pour modéliser des mémoires inscriptibles embarquées (SRAM), ou pour modéliser des mémoires non inscriptibles (ROM) dont le contenu est cablé. Ce composants peut contenir un ou plusieurs segments (correspondant à des tranches disjointes de l'espace addressable). Cela signifie que ce composant décode les bits de poids fort de l'adresse VCI pour adresser le segment désigné. Les dimensions des tableaux qui implémentent les bancs mémoire physique sont définis par les longueurs des segments définis dans la MappingTable?.
3 Génération et chargement du logiciel embarqué
Il existe plusieurs façons de définir et de générer le code binaire qui sera exécuté par le (ou les) processeur(s) du MPSoC. Si on part d'une application logicielle écrite en langage C, il faut utiliser un cross-compilateur spécifique pour le processeur choisi. Le résultat est un fichier binaire au format ELF. Le code binaire correspondant doit être chargé dans les mémoires embarquées du MPSoC. Il y a donc deux étapes bien distinctes, qui sont la génération du fichier ELF, et le chargement.
3.1 Génération du code
A détailler...
3.2 Chargement du code
Il existe deux méthode méthodes permettant de charger le code binaire dans les mémoires embarquées sur la puce:
- Le code peut être stocké dans des mémoires mortes (ROM). Le contenu de ces mémoires est défini lors de la fabrication de la puce, et n'est plus modifiable. Cette approche est évidemment très peu flexible, et elle n'est généralement utilisée que pour le code de boot.
- Le code est stocké dans des mémoires inscriptibles (SRAM), qui sont chargées lors de la mise sous tension du système à partir d'un périphérique de stockage externe (cela peut être une ROM externe, une mémoire flash, ou un autre dispositif de stockage. On peut même imaginer qu'on utilise une liaison sans fil pour télécharger du code applicatif disponible sur un serveur distant. Cette approche est utilisée pour le code applicatif, mais également pour le système d'exploitation embarqué. Le code qui exécute ce chargement de code s'appelle un bootloader.
La phase de chargement du système d'exploitation et du code applicatif est en pratique exécutée à chaque mise sous tension, ou chaque fois qu'on active le signal NRESET. Elle peut être très longue (plusieurs millions de cycles). Un fois que le bootloader a été validé, cette phase d'initialisation n'apporte plus beaucoup d'information, quand on souhaite mettre au point ou mesurer les performances d'une application logicielle sur une architecture matérielle modélisée avec SoCLib.
La plate-forme SoCLib fournit donc un service permettant d'initialiser directement les mémoires embarquées à partir du code contenu dans le fichier ELF. Cette initialisation n'est plus réalisée lors de l'exécution de la simulation (dans la phase de boot), elle est réalisée avant le démarrage de la simulation par le constructeur des composants modélisant des mémoires embarquées (ROM ou RAM). Le constructeur du composant VciSimpleRam possède un argument loader qui lui permet d'accéder au contenu du fichier ELF contenant le code binaire. Le constructeur possédant un autre argument lui permettant d'accéder à la MappingTable?, il peut déterminer quels segments de la RAM (ou de la ROM) doivent être initialisés. Danx ces conditions, le code de boot peut être beaucoup plus court.
4 Travail à réaliser
L'archive soclib_tp3.tgz contient différents fichiers dont vous aurez besoin pour ce TP. Créez un répertoire de travail spécifique TP3, recopiez l'archive dans ce répertoire TP3, et décompressez-la:
$ tar xzvf soclib_tp3.tgz
Cette archive contient un très grand nombre de fichiers, car les composants instanc!és sont des objets complexes, qui font appel à beaucoup de code caché : le chargement initial des mémoires embarquées ROM et RAM nécessite l'analyse du format de fichier binaire ELF. De même, l'utilisation d'un contrôleur de terminal suppose l'ouverture d'une ou plusieurs fenêtres XTERM sur la station de travail qui exécute la simulation.
Nous ne les décrivons pas en détail, mais vous pouvez consulter le fichier Makefile pour avoir la liste de tous les fichiers objets qui doivent être compilés pour générer le simulateur de cette architecture très simple.
L'archive fournie contient en particulier les fichiers suivants correspondant aux modèles des composants instanciés :
vci_xcache_wrapper.h: définition du composantVciXcacheWrappervci_xcache_wrapper.cpp: méthodes associéesvci_lcd_coprocessor.h: définition du composantVciLcdCoprocessorvci_lcd_coprocessor.cpp: méthodes associéesvci_simple_ram.h: définition du composantVciSimpleRamvci_simple_ram.cpp: méthodes associéesvci_multi_tty.h: définition du composantVciMultiTtyvci_multi_tty.cpp: méthodes associéesvci_vgsb.h: définition du composantVciVgsbvci_vgsb.cpp: méthodes associéestp3_top.cpp: top-cell de l'architecture
Elle contient également un sous-répertoire soft qui est utilisé pour la génération du logiciel embarqué.
4.1 Segmentation de l'espace adressable
Cette architecture nécessite la définition de 7 segments:
- seg_tty est le segment associé au contrôleur de terminaux TTY. On prendra pour adresse de base la valeur 0xC0000000, et pour longueur 64 octets, ce qui permet d'adresser jusqu'à 4 terminaux indépendants (consulter la spécification fonctionnelle du composant VciMultiTty?).
- seg_lcd est le segment associé au coprocesseur LCD. On prendra pour adresse de base la valeur 0xB0000000. La longueur de 16 octets correspond aux quatre registres adressables de ce composant.
- seg_reset est le segment contenant contient le code de boot exécuté à la mise sous tension. Il est évidemment assigné à la ROM. L'adresse de base 0xBFC00000 est imposée par la spécification du processeur MIPS32. On choisira une capacité de stockage de 4Koctets.
- seg_kernel est le segment contenant le code du système qui s'exécute en mode kernel. Il s'agit principalement du Gestionnaire d'Interruptions, Exceptions, et Trappes (GIET) et du code des appels systèmes. Ce segment est assigné à la RAM. L'adresse de base 0x80000000 est imposée par la spécification du processeur MIPS32 qui impose que le point d'entrée est à l'adresse 0x80000180. On choisira une capacité de stockage de 4 Koctets.
- seg_text est le segment contenant le code de l'application logicielle embarquée, qui s'exécute en mode user. Il est assigné à la RAM. On choisira pour adresse de base la valeur 0x00400000, et une capacité de stockage de 16 Koctets.
- seg_data est le segment contenant les données globales et la pile d'exécution de l'application logicielle embarquée. Il est assigné à la RAM. On choisira pour adresse de base la valeur 0x00000000, et une capacité de stockage de 64 Koctets.
- seg_stack est le segment contenant la pile d'exécution de l'application logicielle embarquée. Il est assigné à la RAM. On choisira pour adresse de base la valeur 0x00800000, et une capacité de stockage de 64 Koctets.
Remarque importante : Ces informations de segmentation sont utilisées à la fois par le matériel et par le logiciel embarqué. Elles doivent donc être définies à deux endroits :
- Dans le fichier tp3_top.cpp pour définir le contenu de la MappingTable, qui est utilisée configurer les composants matériels.
- Dans le fichier soft/ldscript qui est utilisé par l'éditeur de liens lors de la compilation du logiciel embarqué, pou définir les adresses de base des différents segments (mémoire et périphériques).
Complêtez les fichiers tp3_top.cpp et soft/ldsript pour définir les adresses de base et les longueurs des segments.
4.2 Compilation du logiciel embarqué
Le logiciel embarqué est défini dans plusieurs fichiers source, que vous trouverez dans le répertoire soft. Certains de ces fichiers sont écrits en assembleur MIPS32, certains sont écrits en C :
- le fichier reset.s est écrit en assembleur et contient le code de boot qui est exécuté à la mise sous tension, ou lors de l'activation du signal NRESET. Ce code s'exécute en mode kernel et initialise quelques registres, avant d'exécuter l'instruction eret.
- le fichier giet.s est écrit en assembleur et contient le code du Gestionnaire d'Interruption, Exceptions et Trappes.
Ce code s'exécute en mode kernel, et se termine toujours par une instruction eret.
- le fichier syscall.s est écrit en assembleur et contient le code des quelques appels système disponibles sur cette plate-forme minimale. Ils s'exécutent en mode kernel, et permettent l'accès aux périphériques.
- le fichier stdlib.c est la version C des appels système définis dans le fichier syscalls.s. Ces fonction C se contentent d'encapsuler l'instruction assembleur syscall après avoir placé les valeurs des arguments dans les registres appropriés. Elles peuvent donc être appelées depuis un programme s'exécutant en mode user.
- le fichier main.c est écrit en C et contient n'importequelle application logicielle qui se contente des quelques appels système définis dans stdlib.c.
- le fichier Makefile permet de lancer la compilation du logiciel embarqué.
On peut considérer que les trois fichiers reset.s, giet.s, et syscalls.s jouent le rôle d'un système d'exploitation extrêmement réduit, qui se contente de lancer une unique application en mode user, en protègeant l'accès aux périphériques et à la mémoire. Question : Quels sont les appels système qui permettent d'accéder à un terminal TTY ?
On rappelle que l'instruction eret de sortie du GIET ou du code de boot effectue principalemnt deux actions :
- Elle modifie le registre SR (registre 12 du coprocesseur système) pour que le processeur retourne dans le mode où il était lorsqu'il a été dérouté par une interruption, une exception ou un appel système.
- Elle effectue un branchement à l'adresse contenue dans le registre EPC (registre 14 du coprocesseur système).
Question : Quels sont les registres initialisés par le code de boot ? pouquoi ces initialisations ?
Puisqu'on dispose d'un contrôleur de terminal dans l'architecture, le premier programme que vous allez exécuter se contentera d'afficher le célèbre hello world sur le terminal. Complêtez le fichier main.c en utilisant la fonction C fputs(). N'oubliez pas de terminer proprement le programme par un appel à la fonction C exit().
Lancez l'exécution du Makefile. Un fichier soft.bin doit doit être créé dans le répertoire soft. le fichier soft.bin.txt contient un version desassemblée de ce code binaire, qui vous permet de visualiser le code qui va être chagé dans les mémoires du prototype virtuel, pour exécution par le processeur MIPS32.
4.3 Instanciation des modèles des composants
Comme dans le TP2, il faut modifier tous les fichiers des composants qui possèdent des paramètres templates pour définir les valeurs de ces paramètres templates. Il faut ajouter à la fin de chaque fichier une ligne du type :
template class VciLcdCoprocessor<soclib::caba::VciParams<4, 8, 32, 1, 1, 1, 12, 1, 1, 1> >;
4.4 Définition de la Top-cell
Il faut compléter le fichier tp3_top.cpp, pour définir complêtement la MappingTable?, définir les arguments des constructeurs et les valeurs des paramètres template des différents composants matériels instanciés, et définir le cheminom permettant au loader d'accéder au fichier ELF.
4.5 Compilation et génération du simulateur
Complêtez le Makefile qui vous est fourni dans le répertoire TP3, pour définir l'ensemble de tous les fichiers objet utilisés pour construire le simulateur tp3_mono_simulator.x.
Lancez la compilation, puis exécutez la simulation.
4.6 Modification du logiciel embarqué
Il est maintenant possible de modifier le logiciel embarqué (fichier main.c), sans modifier l'architecture matérielle (fichier tp3_top.cpp). L'application logicielle hello world n'utilisait pas le coprocesseur LCD. Modifiez le fichier main.c, pour que les programme C exécute une boucle infinie dans laquelle on effectue successivement les sept opérations suivantes :
- affichage du numéro de cycle et du numéro d'itération.
- génération aléatoire de deux variables OPA et OPB de type int.
- écriture de OPA dans le registre r_opa du coprocesseur LCD.
- écriture de OPB dans le registre r_opb du coprocesseur LCD.
- écriture dans le pseudo-registre r_start du coprocesseur LCD, pour démarrer la simulation.
- lecture dans le registre r_res du coprocesseur LCD pour récupérer le résultat.
- affichage des valeurs des opérandes et du résultat sur le TTY.
Pour afficher sur le terminal, on utilisera évidemment la fonction printf(). Pour obtenir le numéro de cycle, on utilisera la fonction... Pour la génération aléatoire, on utilisera la fonction rand(). Pour les accès au coprocesseur LCD on utilisera les fonctions...
Le code de ces fonctions est défini dans le fichier...
5 Compte-rendu
Il ne vous est pas demandé de compte-rendu pour ce TP, mais on vous demandera une démonstration de votre simulateur au début du TP de la semaine suivante...
Attachments (2)
- soclib_tp3_archi.png (25.6 KB) - added by 15 years ago.
- soclib_tp3.tgz (4.8 KB) - added by 10 years ago.
{kind=link}
Download all attachments as: .zip